ファナック株式会社-ROBODRILL
「高信頼性・高性能 小型切削加工機」 ■特徴 高い加工性能 ・高速、高精度、高品位加工を実現する高剛性機構部と最新の制御機能 ・様々な分野での活用を可能にする多彩な主軸ラインアップ ・安定加工により高生産性を実現する熱変位補正機能 高い稼働率 ・高信頼性設計と優れた保守性、充実した予防保全機能によ…
- ロボットの種類・特徴
- 現場改善
- 最新情報

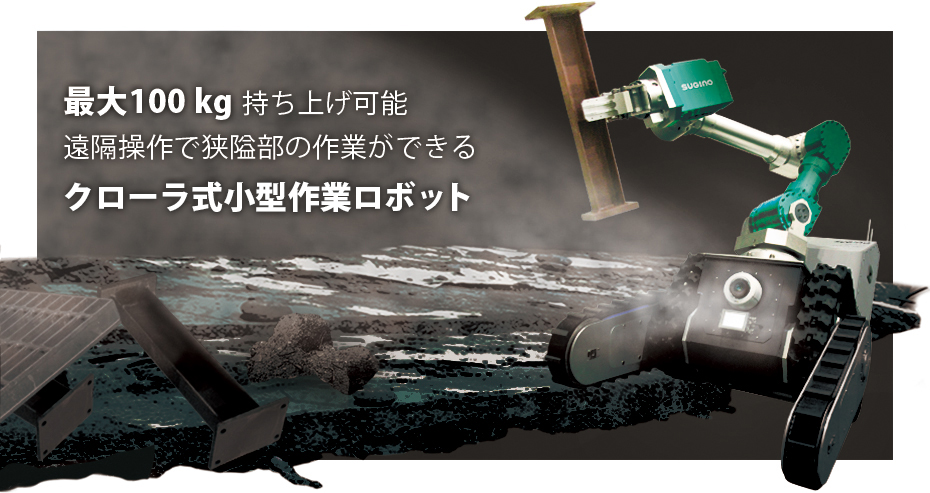
㈱スギノマシンより販売されていますクローラ式小型作業ロボットをご紹介します。
狭い空間での移動・作業が可能な小型ロボット!
今回はスギノマシンクローラ式小型作業ロボット「Crawler Type Multi-Joint Robot」をご紹介いたします。 原子力施設での災害対応用に開発されましたロボットで、 クローラタイプの移動機構に多関節アームを搭載し、最大100kg持ち上げ可能! 遠隔操作で、狭い空間での移動・作業が可能です。巡回や点検作業にも活用頂いております。
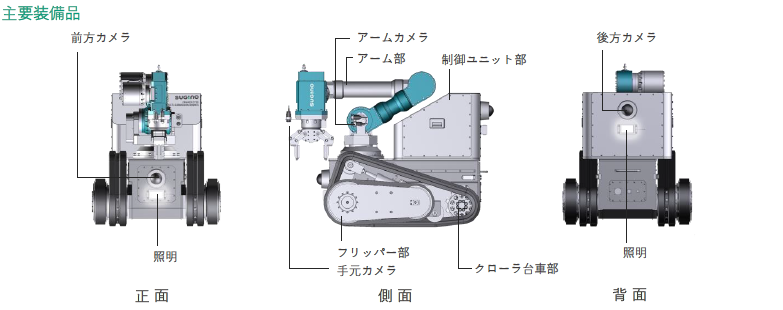
■狭隘部・特殊環境下での遠隔作業が可能 幅80㎝、高さ105㎝とコンパクト 制御通信に無線LANを使用。バッテリー搭載で、完全無線化
■悪環境での高い動作性 クローラ台車の前輪にフリッパーを搭載し、重作業時の転倒防止と20㎝の段差乗り越えが可能 転倒状態からロボット自身で起き上がることが可能 アーム旋回部にはトルク保護機構を搭載し、装置転倒時のアーム破損を軽減
■高い作業性 アーム5軸+ハンド1軸で自由な動きが可能 最大可搬重量100kgで重量物に対応 (アーム伸長時:50kg)AC100V対応
■直感的な操作性 アームが3軸同時制御のため、ハンドの先端教示で容易にアームを操作可能 コントローラにジョイスティックを使用し、直感的に操作速度を調節可能
| 外観寸法 | 幅800mm×奥行1,300mm×高さ1,050mm(クローラおよびアーム収納時) |
| 質量 | 約460kg(バッテリー含む) |
| 最高走行速度 | 0.65km/h |
| 駆動方式 | 電動(リチウムイオンバッテリー方式または有線給電方式の選択が可能) |
| 連続稼働時間 | 4時間(平地走行時) |
| 制御通信方式 | 無線LAN (IEEE 802.11) |
| 堰乗越え | 高さ200mm |
| アーム長 | 約1,500mm |
| 軸数 | 5軸(アーム部)+ 1軸(ハンド部) |
| 可搬質量 | 最大100kg (アーム屈曲時:100kg、アーム伸長時:50kg) |
| 最大把持力 | 1960N |
いかがだったでしょうか。
今回は(株)スギノマシンのクローラ式小型作業ロボットをご紹介いたしました。 興味のあるかた、資料がほしいという方は是非一度お問い合わせください。
「高信頼性・高性能 小型切削加工機」 ■特徴 高い加工性能 ・高速、高精度、高品位加工を実現する高剛性機構部と最新の制御機能 ・様々な分野での活用を可能にする多彩な主軸ラインアップ ・安定加工により高生産性を実現する熱変位補正機能 高い稼働率 ・高信頼性設計と優れた保守性、充実した予防保全機能によ…

重量物の搬送もお任せ下さい。 アイエイアイ製品(スライダータイプ) NO.1の搬送能力 ■特徴 ・長いストローク 最長ストローク 2800mm ・速い 最高速度 2000mm/s ※中間サポートモデルもラインナップ、長ストロークでも高速動作が可能!! ・高可搬 最大可搬質量(水平)400kg(垂…

pneumagiQ (ニューマジック) pneumagiQ(ニューマジック) を導入して工場の省人化・自動化を高めましょう。 昨今、ダブルハンドシステムが現場の作業効率を高める手段として注目されています。 ダブルハンドシステムの導入で、ロボットによる工作機械のワーク交換(マシンテンディング)や ワー…