産業用ロボットとは
工業におけるロボットとは
ロボットというと日本では昔から漫画やアニメなどで描かれ私たちにとっても非常に馴染み深いものでありますが、工業においてロボットとはどのように定義できるものなのでしょうか。『JIS0134 2.6ロボットの定義』を見てみると、次のように記載されております。
- 注記1
- ロボットは,制御システム及び制御システムとのインタフェースを含む。
- 注記2
- ロボットを産業用ロボット又はサービスロボットに分類するには,所期の用途によるものとする。
つまりプログラムで制御する軸(人間で言う関節)を2つ以上複数持ち、決められた作業を実行する機械装置が工業においてはロボットと定義されることになります。そして注記2を見たときに、工業におけるロボットは、産業用ロボットとサービスロボットに分けることができることがわかります。
産業用ロボットとサービスロボットの違いについて
では次に産業用ロボットとサービスロボットの違いについて見ていきましょう。まず産業用ロボットとは主に食品工場や自動車工場などで生産ラインなどの自動化に用いられるロボットを指し、『JIS0134 2.9』では「自動制御され,再プログラム可能で,多目的なマニピュレータであり,3 軸以上でプログラム可能で,1 か所に固定して又は移動機能をもって,産業自動化の用途に用いられるロボット」だと定義されています。
つまりマニピュレータ(対象物をつかみ、動かすことを目的とした機械。腕に相当する)と、プログラムで制御される複数の軸を3つ以上持っていることが構造上の要件と言えます。
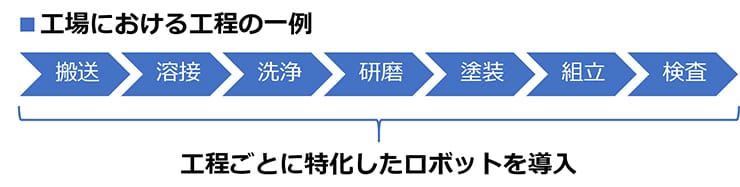
更に産業における自動化を目的とした産業用ロボットですが、1種類の産業用ロボットでその生産現場全体の自動化を実現するわけではありません。例えば自動車工場ですと、スポット溶接を行うためのロボット、ボディ塗装を行うロボット、部品取り付けを行うロボットというようにそれぞれの工程に特化したロボットを導入することで産業の自動化を実現することになります。
そしてこれにより、重量物を運搬しなければならない、有害な気体を発生させる塗料で塗装を行わなければならないなど、身体への負担が大きい環境下での労働をロボットに行ってもらうことができます。更にそれによる作業ミスの誘発の低減だけでなく、作業人数の削減によるコストダウン、作業品質の均一化による品質向上なども実現します。
一方、サービスロボットとは『JIS0134 2.10』によると、「人又は設備にとって有益な作業を実行するロボット。産業自動の用途に用いるものを除く。」と定義されています。
このうち、「産業自動化の用途」には,製造,検査,包装,組立などが挙げられますので、サービスロボットは産業用ロボットとは異なり構造上の定義はなく、産業用ロボットとの違いは用途・目的になります。
そのため、同じ多関節ロボットを生産現場に導入するとそれは産業用ロボットになりますが、食事支援を目的に導入した場合、それはサービスロボットになります。
産業用ロボットの種類について
このように「産業における自動化を目的とした」ものが産業用ロボットと述べましたが、産業用ロボットは軸の数や取り付けるアームによって種類が多岐にわたります。そしてその種類によって得意な作業も変わってきますので、産業用ロボットの種類とそれぞれの特徴をしっかり把握することが、ファクトリーオートメーションを成功させる第一歩と言えます。産業用ロボットは大きく次の4種類に分けることができます。
垂直多間接ロボット(軸数:4~7軸)

垂直多関節ロボットは人間の腕に近い構造をしている、最も普及している産業用ロボットです。
軸数は5~6軸のものが主流で、近年は7軸のものも出てきています。
特徴として、その汎用性の高さが挙げられます。
動きの自由度の高さから用途のバリエーションに富み、搬送から溶接や塗装、組立まで幅広い工程に導入されています。しかし動きの自由度が高い一方で、直交型のようなシンプルな構造をしているタイプに比べると剛性に劣ります。
そのため特に高速で動かしたときには振動が発生しやすく、複雑で精緻な制御が必要になります。
水平多間接ロボット(軸数:4軸)

水平多関節ロボットは水平方向にアーム作動する産業用ロボットです。
スカラロボットとも呼ばれますが、これは英語で「selective compliance assembly robot arm」と呼称され、その頭文字をとって「SCARA」ロボットとなります。
4軸構造となっており、高速移動で水平方向の位置を決定してから、先端部を上下に動かして高さ方向の位置を決める仕組みになっています。
そのため半導体ウエハなどの搬送・移載作業や基板など上からの組付作業、部品の押し込み作業などの用途に導入されます。
パラレルリンクロボット(軸数:4~6軸)

パラレルリンクロボットは、パラレルメカニズム(並列なリンクを介して1点の動きを制御する方法)を採用した産業用ロボットです。
軸数は4軸~6軸で天井から吊り下げて設置します。
スピードが一番早く、高速のピックアンドプレースに向いているが、軽いものしか運搬できないという弱点もあります。
そのためベルトコンベアで流れてくる食品の整列や選定のような作業に導入されます。
直交ロボット(軸数:2~4軸)
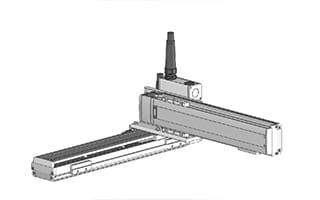
直交ロボットは直線的な動きをとる産業用ロボットです。
軸数は2~4軸で直線的な動きしかできない一方、導入コストを低く抑えることができるのが特徴として挙げられます。
構造がシンプルで設計の自由度が高く、もともとは直線的な動きで足りる場面のみに採用されておりましたが、近年では多関節ロボットなどと組み合わせて導入するケースが増えております。
それ以外の産業用ロボットの分類について
協働ロボット

これら以外の分類としてまず挙げられるのが「協働ロボット」です。
協働ロボットの基準は、労働安全衛生法の「平成25年12月24日付基発1224第2号通達」に求めることができますが、つまるところ「接触しても危険が及ばない産業用ロボット」と言うことができます。
そのため協働ロボットの場合は通常の産業用ロボット導入に際して必要になる安全柵や囲いを施す必要がありません。
そのため協働ロボットに分類されない産業用ロボットに比べて、導入コストを抑えることができるというメリットが挙げられます。
双腕ロボット

他に分類として挙げられるのが「双腕ロボット」です。これは読んで字のごとく2対の腕を持った人間型ロボットで、協働ロボットの1つに分類されます。
メリットは何と言っても「人間と同じような作業ができること」です。これはこれまでの産業用ロボットとは一線を画します。
まず従来の産業用ロボットは専用のラインで単純な作業を繰り返すものでしたが、双腕ロボットは人間と同じように繊細かつ複雑な動きができることが1つ目の特徴です。
また先述の通り産業用ロボットは通常、各工程に特化したロボットを導入するのが通常です。
しかし双腕ロボットだと1台で複数種類の作業をこなすことができるのが2つ目の特徴です。そのため導入コストを削減することが可能です。