
ヤマザキマザック株式会社 複合加工機 INTEGREX j-200 NEO
複合加工機が実現する省人化と生産性向上 製造現場では、人手不足や技能継承、多品種少量生産への対応など、さまざまな課題が増えています。特に「段取り時間が長い」「設備間の移動が多い」「作業負担が大きい」といった課題を抱える現場も少なくありません。こうした課題への対応策として注目されているのが「工程集約」…
- ロボットの種類・特徴
- 現場改善
- 最新情報

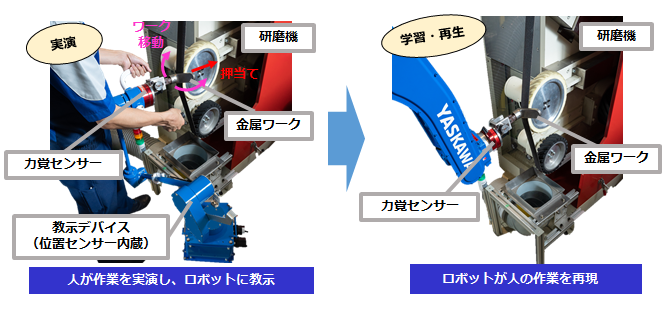
株式会社安川電機のMOTOMAN-Craftを紹介致します。
熟練を要する微妙な力加減や複雑な動きの作業工程をロボット化する為、
人の動きを直接ロボットに教え込むこと(教示)が可能なロボットになります。
製品化のねらい
生産現場では、3K職場の敬遠や少子化による人手不足が進む中、更なる生産性や競争力の向上に向けて産業用ロボットの活用が進んでいますが、樹脂や金属面の研磨などの特定工程においては、高いスキルを有する熟練作業者に支えられている現場が存在します。
これらの現場では高齢化が進み、後継者不足からの技能伝承や人材育成に費やす時間や費用負担などの問題が顕著化しています。また、これらの現場の作業は滑らかな力加減、巧みな動きでなされていることから、手技の数値化・プログラム化が困難でロボットへの教示や活用を難しくさせています。
たとえ多くの時間を費やしてロボットへの教示を行っても、多品種少量への対応は困難で、結果的に人手に頼っている現状があります。そのような背景から、人の動きを直接ロボットへ教示できるパッケージの製品化に至りました。
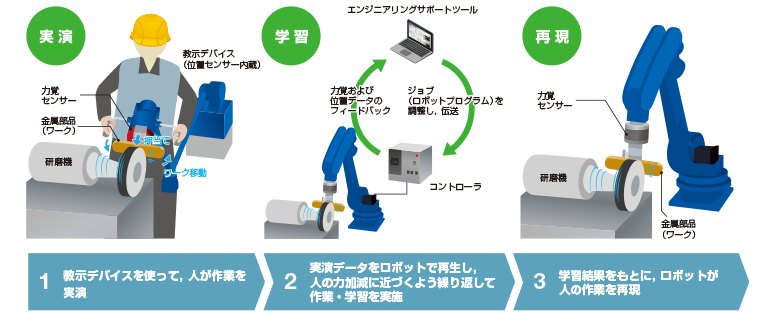
■人の動きを数値化しプログラムを自動生成
通常、ロボットに動きをを教えるには、プログラムペンダントを使用して、動作命令、数値による位置情報を入力しプログラムを作成する必要が有ります。そこで、人の動きをセンシングする専用教示デバイスの操作により、プログラムを自動生成します。
専用教示デバイスを使用した実演による教示であれば、研磨のようなワークの局面形状に合わせた3次元的な軌道と力加減を短時間で簡単にプログラム化することが可能です。
■学習による位置データ・力覚データの自動修正
自動生成されたプログラムの位置と、実際にロボットの先端に把持されたワーク位置とでは、ずれが発生するため、人が教示したときに比べ、ロボットが受ける力が変わってきます。そこで、ロボットが作業を繰り返す中で学習し、自動で修正し力加減を調整します。
■アプローチ動作最短化機能
人が専用教示デバイスを用いて教示を行う際、スタート位置から実作業を行う領域まで動かす経路において、前後左右に調整しながら最終的な作業開始位置や姿勢を探りながら接近する動作が発生します。これらの事前動作は、生産を開始してからは非効率的で不要な動作となります。本機能では、不要な事前動作をプログラムから削除し、スタート地点から最終的な作業開始位置・姿勢までを最短の経路で移動させることができます。
■研磨ワーク等(金属食器、包丁、ハサミ等の刃物、水回りの等の金具部品、自動車部品、時計フレームなど)
■MOTOMAN-Craftを使用すれば、作業者がお手本を示すだけでロボットが忠実に再現。
熟練作業者の高度なスキルを自動化でき、生産性向上に貢献します。
いかがだったでしょうか?
今回は株式会社安川電機の実演教示パッケージ「MOTOMAN-Craft」をご紹介させて頂きました。
弊社はFA商社として培ったノウハウを活かし、お客様のご要望に沿った機械装置をワンストップでサポート
致します。装置化を検討しているが、どこに聞けば良いか分からない場合でも弊社にお声がけください。
資料請求やご質問など、お気軽にお問い合わせください。
複合加工機が実現する省人化と生産性向上 製造現場では、人手不足や技能継承、多品種少量生産への対応など、さまざまな課題が増えています。特に「段取り時間が長い」「設備間の移動が多い」「作業負担が大きい」といった課題を抱える現場も少なくありません。こうした課題への対応策として注目されているのが「工程集約」…

複合加工機 MLUTUS U1000/U2000 オークマ株式会社 クラス最小のスペース、高次元の工程集約、自動化に貢献する 複合加工機をご紹介致します。 ■工程集約と自動化対応を省スペースで実現 ■生産形態に応じた自動化で多品種ワークの長時間生産が可能 フラットな機械前面と下刃物台の直交軸構造によ…

フレックスグリッパ 株式会社イマオコーポレーション/フレックスグリッパをご紹介致します。 ハンドもフィンガーも交換不要。ロボットを止める時間を、つくる時間へ。 ワークサイズに合わせて、ロボットアームの動きだけでフィンガー位置を変更。 ハンドの交換や手作業による調整が不要になり、ロボットを稼働させたま…