
さつき株式会社 αESG(流体攪拌装置)
空調・冷凍機の電気代を削減!配管につなぐだけ 空調効果を落とさずに消費電力を抑える、新しい省エネ対策をご紹介いたします。今回ご紹介させて頂きますのはさつき株式会社の流体撹拌装置「αESG」 です。 空調効果を落とさずに消費電力を抑える、新しい省エネ対策 オフィスや工場で大きなコストとなる空調・冷…
- ロボットの種類・特徴
- 現場改善
- 最新情報

手首関節モジュール「i-WRIST®」は、高速に位置決めを行うロボット用モジュールです。
独自の駆動機構により、まるで人の手首のような自由自在な動きを実現します。
高速性、操作性、省スペースをはじめさまざまな特長をもつi-WRIST®が生産現場の課題解決に貢献します。
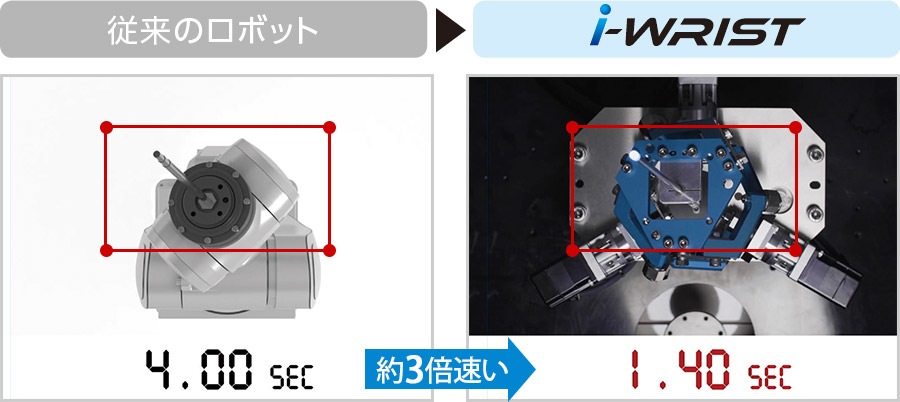
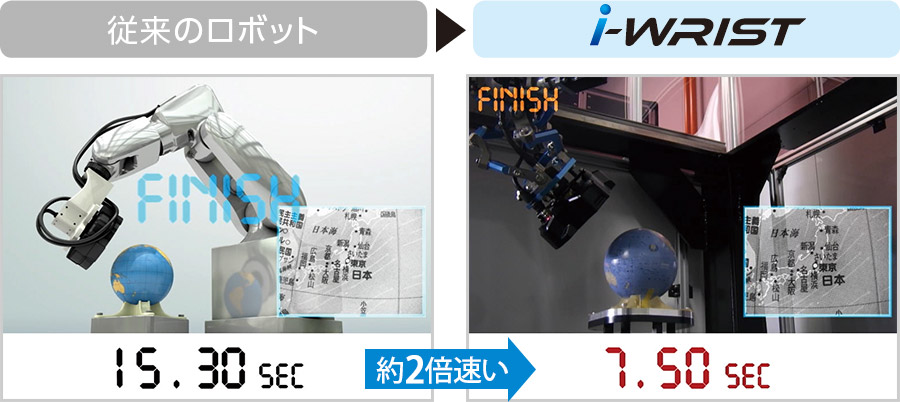
①高速性
i-WRIST®の高速性は、多方向からワークにアプローチする際に特に効果を発揮します。
従来のロボットでは難しかったタクトタイムでも、i-WRIST®なら実現可能です。
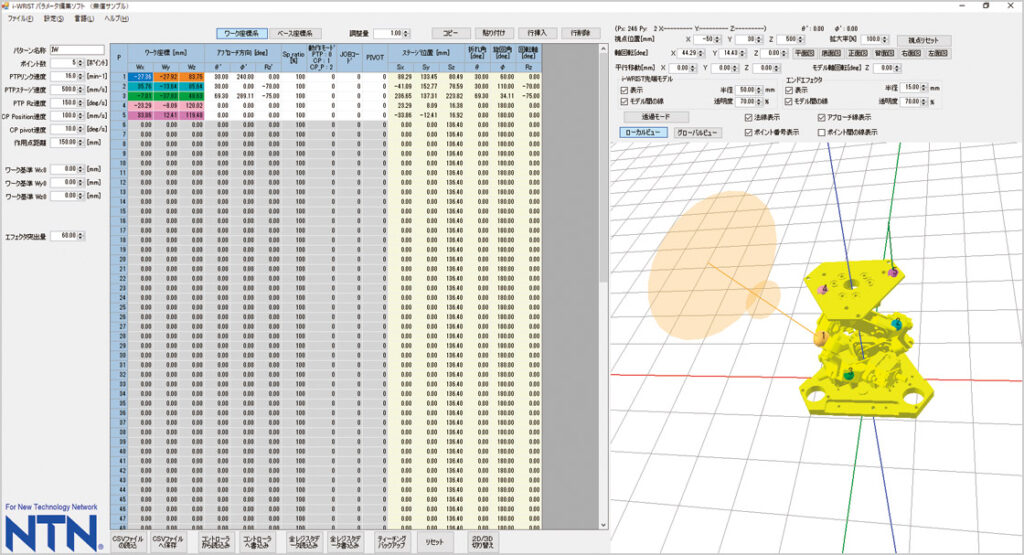
②操作性
従来のロボットを動かす為には、専用のプログラミング言語が必要でした。
i-WRIST®はプログラミング言語そのものが不要なため、簡単に操作ができます。
また、i-WRIST®には従来のロボットのような特異点がありません。その為、ティーチングをする際に
制御上の特異点と配線ケーブルのねじれによる断線などを気にせずティーチングできます。

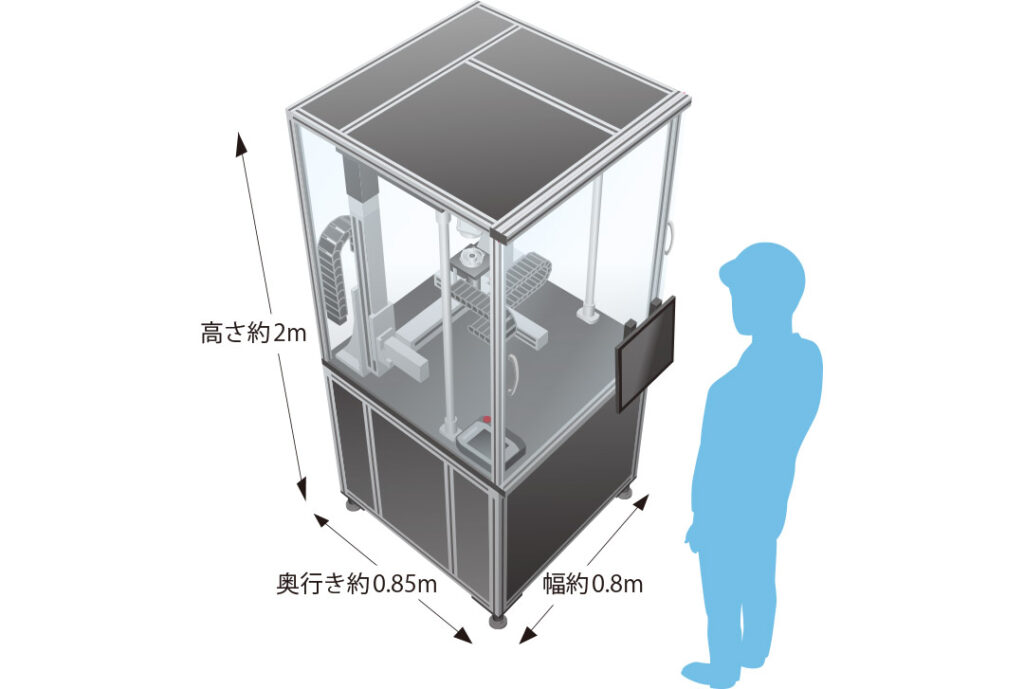
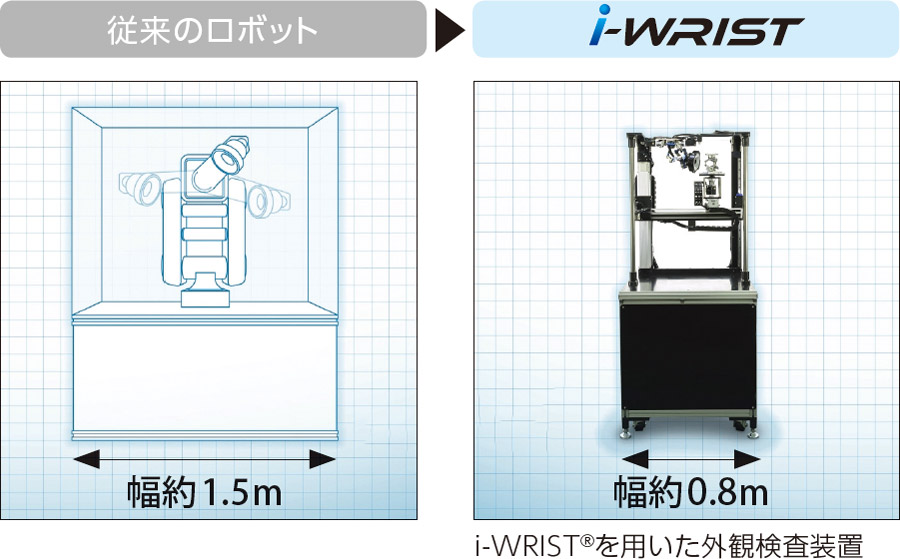
③省スペース
これまで生産現場のスペースの都合で自動化設備の設置を諦めていた工場でも、
i-WRIST®なら設置することができます。
例えば外観検査装置では、直動アクチュエーターや回転アクチュエーターと組み合わせることで
従来のロボットを用いた検査装置の約半分のスペースで設置することができます。
2018年の量産開始以来、お客さまからいただいたさまざまなご要望を受け、2021年に各種機能をバージョンアップ
しました。取付方向は下向きだけでなく、上向き、横向き、傾斜方向にも対応可能となり、
外部通信インターフェースには、従来のパラレル入出力(I/O)に加えて産業用ネットワーク「Ethernet」にも対応し、
通信可能な情報量を増やしました。また、産業用ロボットの安全規格ISO10218-1に準拠する仕様としたほか、
最大指令速度を従来から1.6倍向上させ、さらなる高速化を実現するなどこれまで以上に使い勝手を向上させました。
さらに2022年には最大可搬質量が1kgから3kgに増加させた新グレードを開発しました。
従来よりも幅広い種類のエンドエフェクタの搭載や製品の取り扱いが可能となり、
さまざまな製造工程の自動化と効率化に対応するとともに、生産現場の省人化に貢献します。
いかがだったでしょうか?
今回はNTN(株)の手首関節モジュール「i-WRIST®」をご紹介いたしました。
弊社はFA商社として培ったノウハウを活かし、お客様のご要望に沿った機械装置をワンストップでサポート
致します。装置化を検討しているが、どこに聞けば良いか分からない場合でも弊社にお声がけください。
資料請求やご質問など、お気軽にお問い合わせください。
空調・冷凍機の電気代を削減!配管につなぐだけ 空調効果を落とさずに消費電力を抑える、新しい省エネ対策をご紹介いたします。今回ご紹介させて頂きますのはさつき株式会社の流体撹拌装置「αESG」 です。 空調効果を落とさずに消費電力を抑える、新しい省エネ対策 オフィスや工場で大きなコストとなる空調・冷…

製造現場が抱える課題 近年の製造業では、多品種少量生産や製品の高機能化が進み、複雑形状部品や大型部品の加工ニーズが高まっています。特に大物・長尺ワークの加工では、工程ごとの段取り替えやワークの付け替えが必要となるため、リードタイムの増加や加工精度のばらつき、治具コストの増加といった課題が生じやすくな…

複合加工機が実現する省人化と生産性向上 製造現場では、人手不足や技能継承、多品種少量生産への対応など、さまざまな課題が増えています。特に「段取り時間が長い」「設備間の移動が多い」「作業負担が大きい」といった課題を抱える現場も少なくありません。こうした課題への対応策として注目されているのが「工程集約」…